
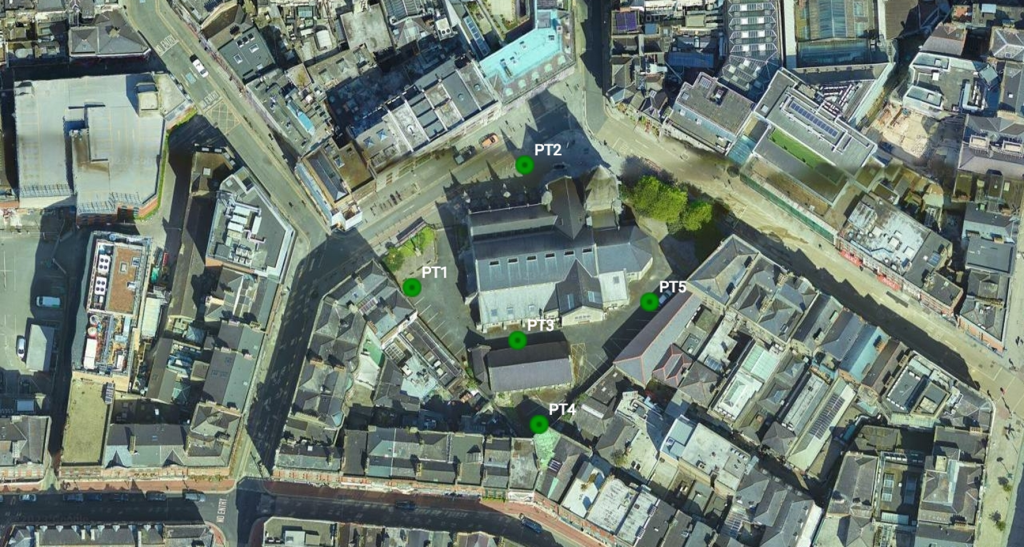
Exterior scans – Mavic 3E Drone – with RTK positioning
Interior scans – Matterport Pro 3
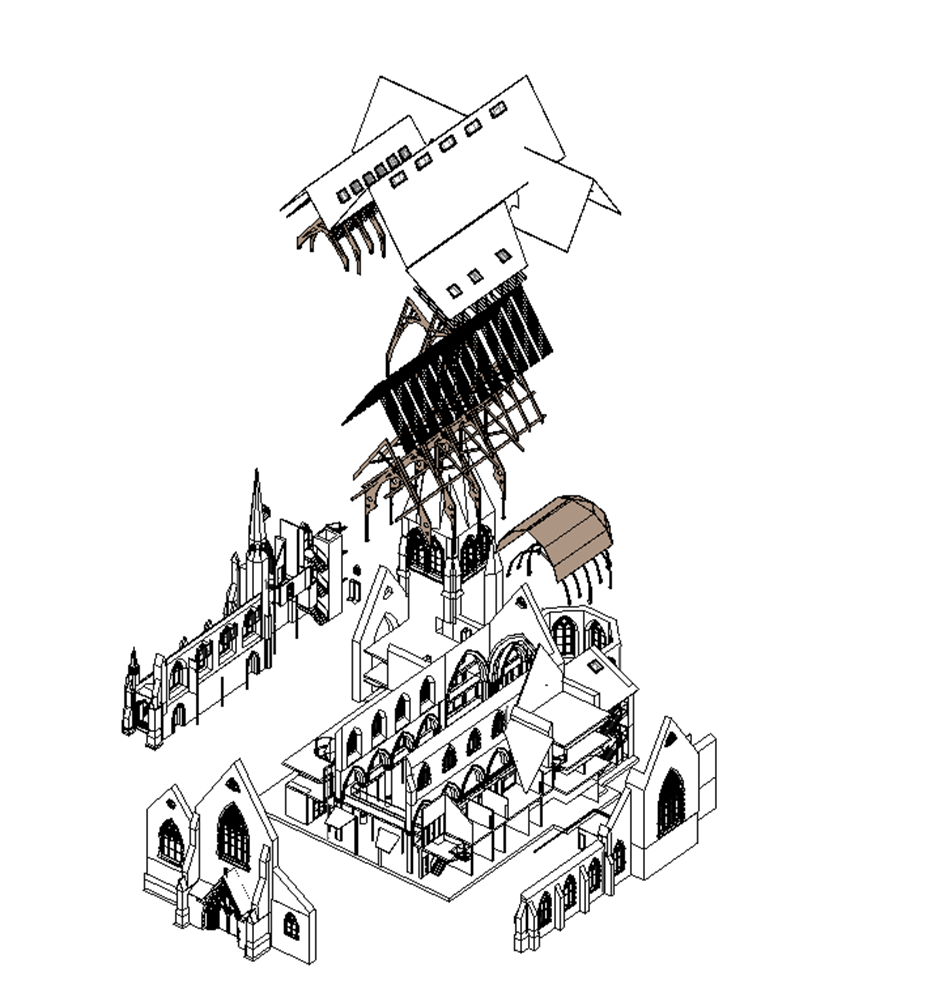
Revit Model
GNSS Rover Zenith 60 used to get ITM coordinates to geolocate the drone model

Processed in DroneDeploy

Imported into Autodesk Recap
The point-cloud generated from the Matterport fits within the point-cloud generated by the drone.
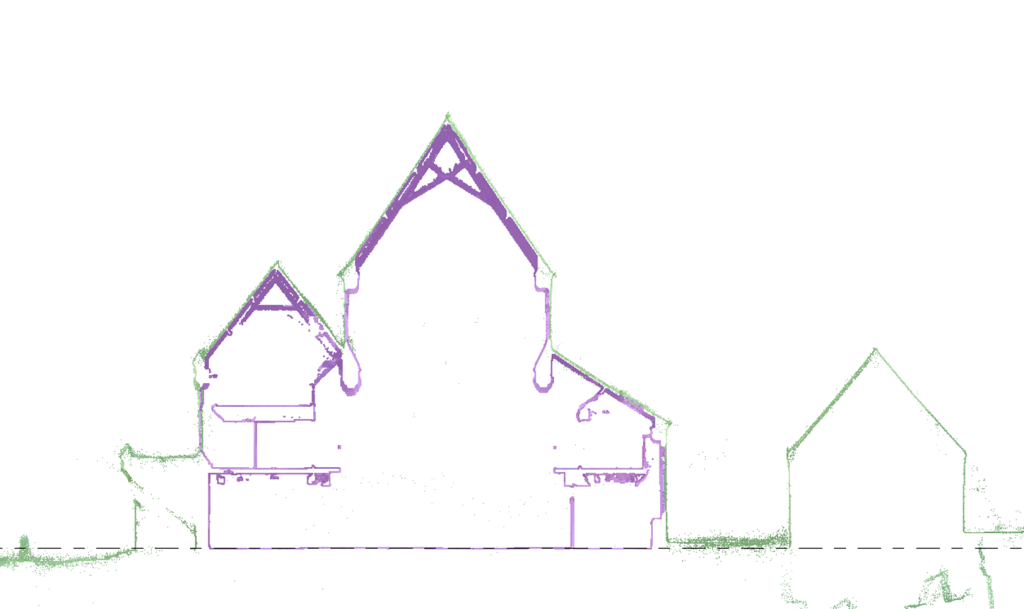
Green – generated from the drone
Purple – generated from the Matterport
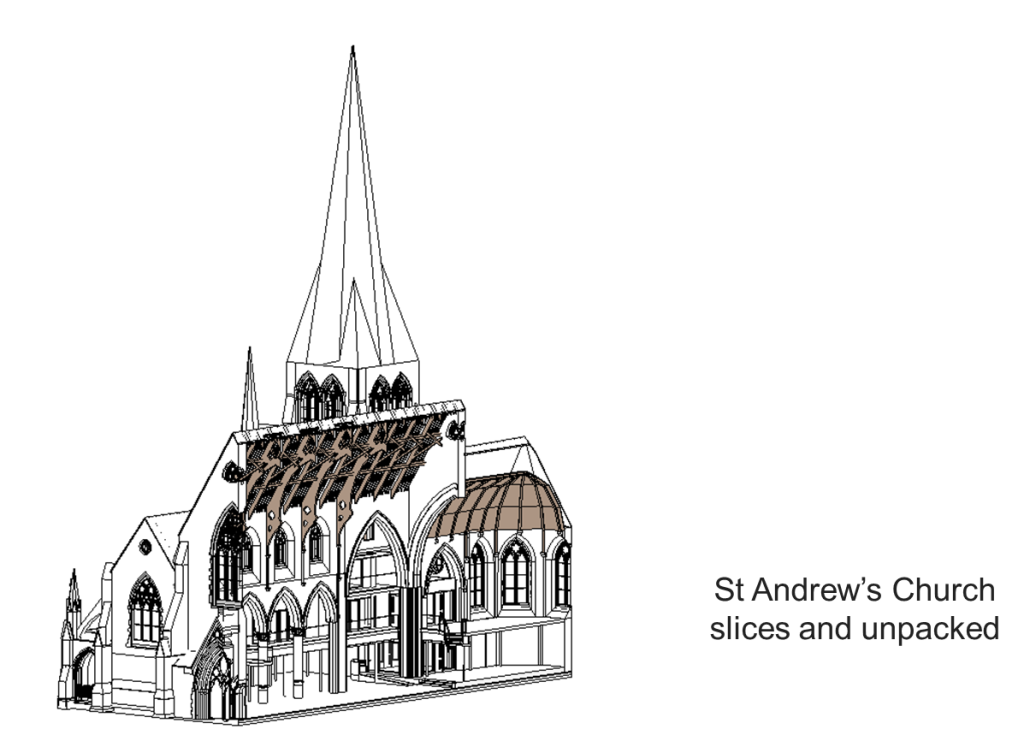
St Andrew’s Church slices and unpacked


Leave a Reply